Partie électronique: ( regarder les ressources électroniques)
questions 1) Repèrer tout les éléments électroniques présents dans la boite .
question 1.1) En ayant pris connaissance des différents éléments électroniques ,de leurs fonctions ,et du montage ,expliquer en quelques phrases ce qu'il se passe quand :
a) On met le robot sous tension
b) Le robot rencontre un obstacle.
c) Le début du protocole et la fin du protocole.
* utiliser les mots suivants : capteur ,contacts KM1 contacts KM2,bobine KM1 ,bobine KM2,bouton marche/arret,moteur M1 et M2, NE555 , courant électrique .
la temporisation est gèrée par le NE555(le robot tourne ou recule pendant un certain temps).Lorsque le robot avance normalement ,l'entrée du NE555 est toujours à 1.(4,5v).
Sitot que le capteur détecte un obstacle ,l 'entrée du NE555 passe donc à 0 le temps de la fermeture du capteur (très rapide) puisque le capteur reprend sa position initiale..puis ,l'entrée du NE555 repasse à 1.
la sortie est à 1 pendant 1,1RC ...
questions 2) on fixe la valeur du condensateur à 47 micro farads .
Poser la question aux "mécaniciens" qui ont défini le temps t de fonctionnement de chaque moteur lors du protocole.( temps M1=..... temps M2=......)
Calculer alors la valeur de chaque résistance R correspondant à chaque NE555 à imposer au montage pour respecter le protocole.(votre résultat aura sûrement pour ordre de grandeur le kilo ohms)
Entourer alors sur le schéma les 2 résistances associées à chaque NE555.
remarque importante: si votre robot tourne autour de la roue gauche immobile,cela signifie que le NE555 lié à la roue gauche commandera un relais dont les contacts ne seront pas reliés a l'alimentation . (Cela revient à effectuer une temporisation ou il ne se passe rien)
questions 3) En réalité ,nous choisirons de prendre une résistance variable..justifier l'utilité de ce choix....
question 3bis) Le graphique ci dessous est un chronogramme ,il a pour but de connaître dans un système automatisé ,les actions qui sont effectuée ( 1) et celles qui ne le sont pas (0) au cours du temps qui passe (chronologiquement).
Les actions sont dans notre cas ,les suivantes :
KM1 : alimentation de la bobine , /KM1 bobine non alimentée , mot marche avant gauche et moteur marche avant droit .
l'exemple de chronogramme ci dessous représente l'action d'un robot qui avance en ligne droite car les deux moteur sont alimentés (/KM2 et /KM1 pendant un certain temps ) ,puis le capteur gauche détecte un obstacle , active ainsi les 2 bobines KM1 et KM2 provoquant la marche arrière en ligne droite du robot pendant un certain temps en .
Effectuer le chronogramme de votre robot selon votre protocole : on considérera que votre robot avance depuis 5s puis après détection d’un obstacle du capteur gauche ,entame sa rotation (suivant votre protocole),puis reprend sa marche avant pendant 3s. (échelle des temps :1cm = 1seconde )
.
Réglage de la résistance variable que vous allez implanter sur plaque LAB .Appeler le professeur pour qu'il vous apporte le multimètre MX55 ou un multimètre metrix portatif.
sélectionner Ohmètre, mesurer la résistance au bornes 3 et 2 .( valeur affichée en Kilo ohms)
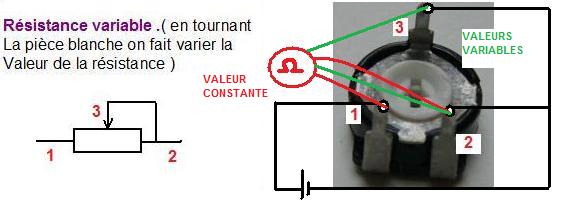
vous devez tourner la petite empreinte blanche à l'aide d'un tournevis afin de regler correctement la résistance calculée auparavant correspondant a votre temps de rotation du robot.
remarque :la valeur de la résistance aux bornes 1 et 2 n'est pas variable ,elle est constante.
questions 3.1) La resistance variable
est correctement placée dans laquelle des 2 positions?justifier.important
: regarder la petite explication sur la plaquelab
(ici
en bas )
questions 4) Un minimum de précautions sont à prendre afin de ne pas déteriorer les composants électroniques polarisés.. le but est donc de trouver le signe des bornes de la diode.Appeler le professeur pour qu'il vous apporte le multimètre (en réalité la borne + est la cathode située coté cercle noir).

si le voltmètre indique une valeur ,alors le coté du fil rouge est la borne +.
Sinon retournez la diode pour vérifier...
questions 5)Souder les fils conducteurs au moteur (8cm de fils)
questions 6)Souder les fils conducteurs à chaque capteur.
questions 7)Souder les fils conducteurs au bouton marche/arrêt.