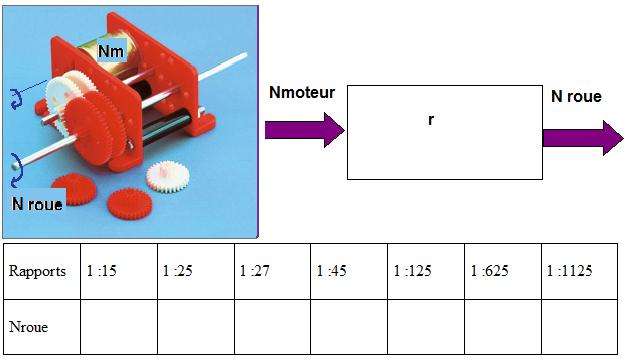
Partie mécanique:
question 1) Alimenté sous 1,5v à quelle vitesse tourne le moteur ?Alimenté sous 4,5v à quelle vitesse tourne le moteur (voir ressource méca)?
Compléter la phrase :cela signifie que plus la tension augmente ,plus la vitesse de rotation N (tr/min).......,faire l'expérience en associant 2 piles d'1,5v en série aux bornes du moteur.
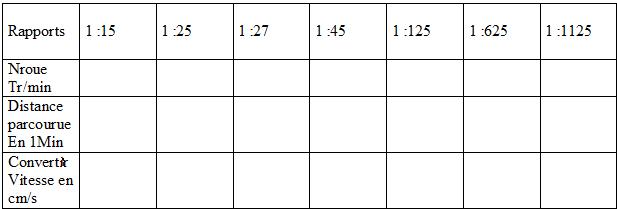
question 2) On choisira d'alimenter notre moteur sous 4,5v ,calculer la vitesse de rotation N roue (tr/min) des roues pour chaque rapport de transmission.
question 3) Calculer la distance parcourue par ce robot en 1min pour chaque rapport.
tout dabord ,effectuer un choix de diamètre de roue : 100 ,ou 80 ou 60 ou 40mm.
le périmètre d'un cercle est 2 Pi x r (mm)
question 4) Remplir le tableau ci dessous ,nous choisirons le rapport 1/45 .(sinon faite votre propre choix de rapport et de diamètre de roue sans que la vitesse du robot n'excède 20 cm/s)
.
question 5) D'apres votre protocole et l'angle de rotation du robot choisi auparavant:
-calculer la distance parcourue par la roue extérieure au virage.
- calculer pendant combien de temps devront fonctionner les (le) moteurs?
on utilsera la formule physique vitesse (connue avant )= distance parcourue : temps
attention l'animation ci dessous montre un angle en degrés or, il doit être en radian ,pour le convertir ,sachez que 6,28 radians = 360 ° !!!
Choisissez la largeur (rayon de rotation ) de votre robot !
question 6) Le graphique ci dessous est un chronogramme ,il a pour but de connaître dans un système automatisé ,les actions qui sont effectuée ( 1) et celles qui ne le sont pas (0) en fonction du temps qui passe.
Les actions sont dans notre cas ,les suivantes :
KM1 : signifie que La bobine KM1 du relais est alimentée ,le moteur gauche tourne dans un sens .
/KM1 :signifie que bobine KM1 non alimentée , mot gauche tourne dans l'autre sens..
KM2 : signifie que La bobine KM2 du relais est alimentée ,le moteur droit tourne dans un sens .
/KM2 : signifie que La bobine KM2 du relais n'est pas alimentée ,le moteur droit tourne dans un autre sens .
CAP : représente de contact lorsque celui détecte l'obstacle et donne l'ordre d'alimenter les différentes bobines.
l'exemple de chronogramme ci dessous représente l'action d'un robot qui avance en ligne droite car les deux moteur sont alimentés (/KM2 et /KM1 pendant un certain temps ) ,puis le capteur gauche détecte un obstacle , active ainsi les 2 bobines KM1 et KM2 provoquant la marche arrière en ligne droite du robot pendant un certain temps en .
Effectuer le chronogramme de votre robot selon votre protocole : on considérera que votre robot avance depuis 5s puis après détection d’un obstacle du capteur gauche ,entame sa rotation (suivant votre protocole),puis reprend sa marche avant pendant 3s. (échelle des temps :1cm = 1seconde ) .